
基于ORB-SLAM2, 对图像帧插帧来更好的应对旋转情况。
《Direct LiDAR Odometry: Fast Localization with Dense Point Clouds》( arXiv:2110.00605 )
Motivation
目前的视觉里程计都很难应对旋转多的场景,作者认为在检测到旋转的时候,对于图像帧进行插值能够缓解旋转导致的不确定性问题。
Contribution
-
作者认为他们是第一个将插值神经网络应用到SLAM系统来提升SLAM在旋转场景的性能。
-
提出了一个检测函数来仅在快速旋转场景进行插值。
-
在KITTI和TUM数据集上进行了测试,并且取得了不错的结果。
Content
- 系统框架
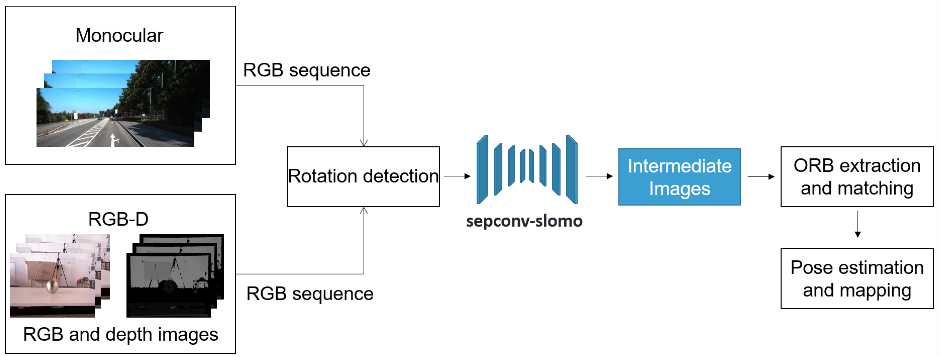
- 旋转检测
如果检测出的角度大于阈值则判定需要进行插值
插值用的网络是sepconv-slomo网络。
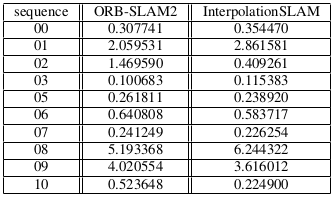
- 实验结果
Conclusion
这篇论文主要的想法是通过插帧来缓解旋转约束的问题,思路是个不错的思路,但是实验效果比较一般。