
这个文章的标题,起的和DVL-SLAM太像了…
《DV-LOAM: Direct Visual LiDAR Odometry and Mapping》(remote sensing 2021 )
Motivation
基于DVL-SLAM, 前端里程计基本和DVL一样,完善了后端回环的融合。
Contribution
- 提出了DV-LOAM,这是第一个将深度增强的直接视觉里程计和激光雷达建图融合的SLAM。它利用了直接VO模块的效率和激光雷达扫描到地图匹配方法的精度,从而进一步提高性能。
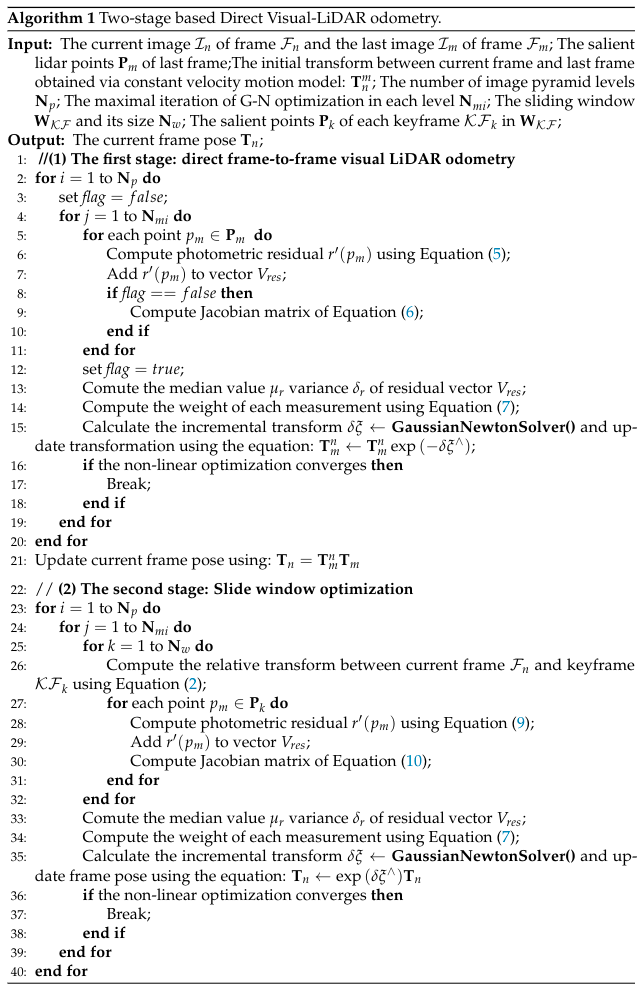
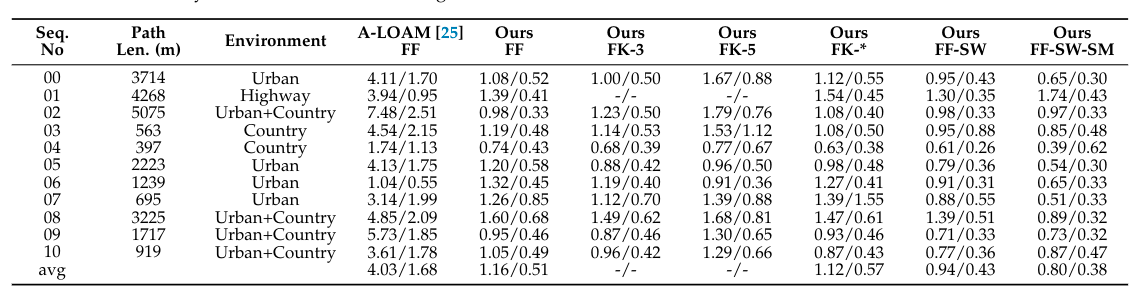
- 在前端,我们提出了一种两阶段的直接跟踪策略来保证实时性,同时保持运动估计的局部精度。首先, 直接帧间视觉里程计用于估计摄像机的姿态, 这比基于ICP的里程计更有效。其次,提出了一种基于滑窗的细化模块用于减少累积漂移。
- 在后端,通过融合BoW和LiDAR-Iris描述子设计了一个PGLS-LCD回环检测,我们的方法不仅可以大大弥补基于视觉的LCD功能现有方法的不足,并且在反向访问的情况下,还可以缓解因为循环累积导致的无法找到正确的循环闭合的问题(漂移超过了激光雷达方法的搜索半径)。此外,使用TEASER的计算作为初始猜测,并应用V-GICP细化姿势变换,在大范围漂移的情况下可以获得更精确的结果。
Content
-
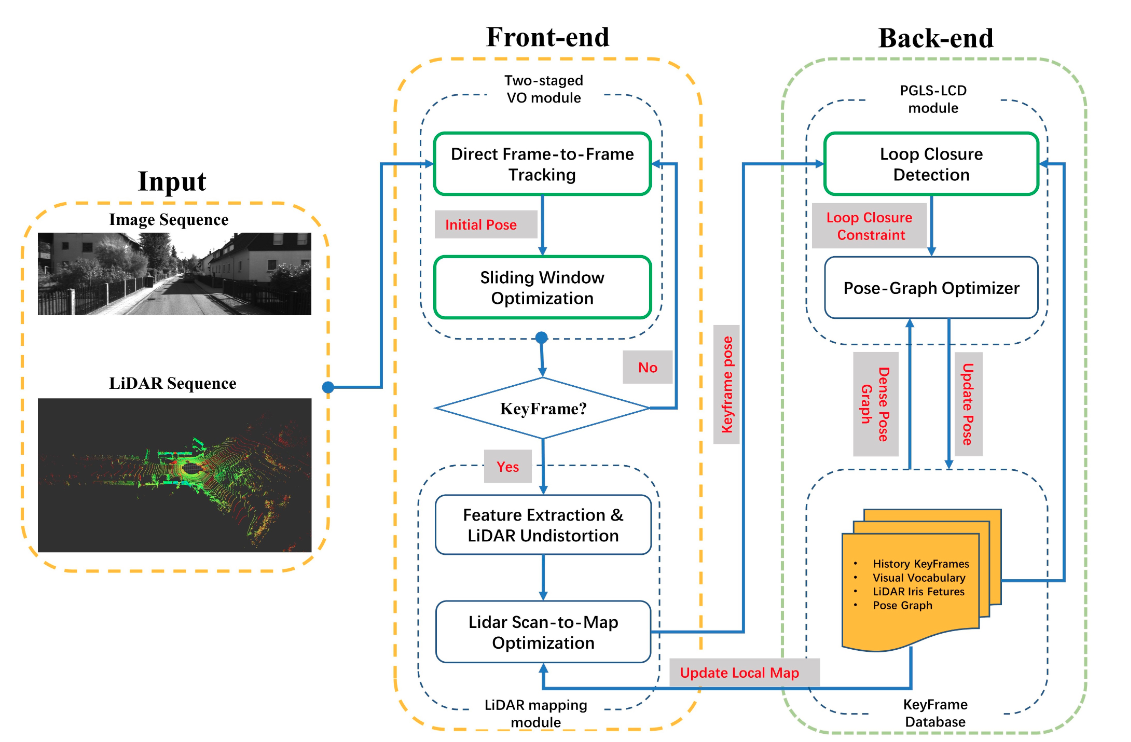
系统框架
分成前端和后端两个部分, 前端包含两个任务,VO和激光建图,每当有新的匹配输入的时候,图像与稀疏深度进行关联,然后执行基于滑窗的优化出位姿。后端包含一个回环检测和一个位姿图优化,本文中提出了PGLS-LCD描述子用来进行位置识别.
-
前端
这个部分基本和DVL-SLAM差不多,不重点描述.
-
后端
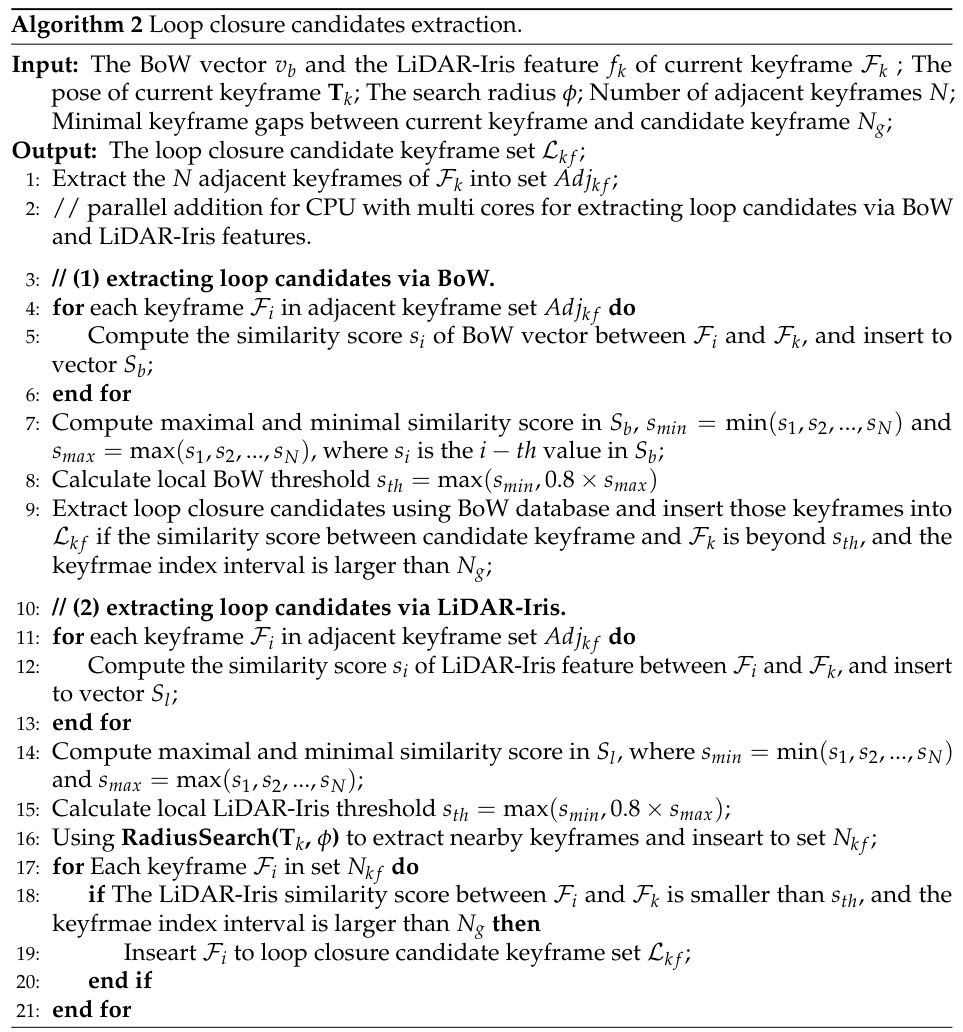
首先描述BoW和Iris各自的缺点,Bow没法反向验证(这个加个几何一致性验证不就能解决了吗?), Iris对于搜索半径有要求, 所以作者认为将这两个融合可以提升回环检测的精度。具体的文中提出的PGLS-回环检测流程如下:
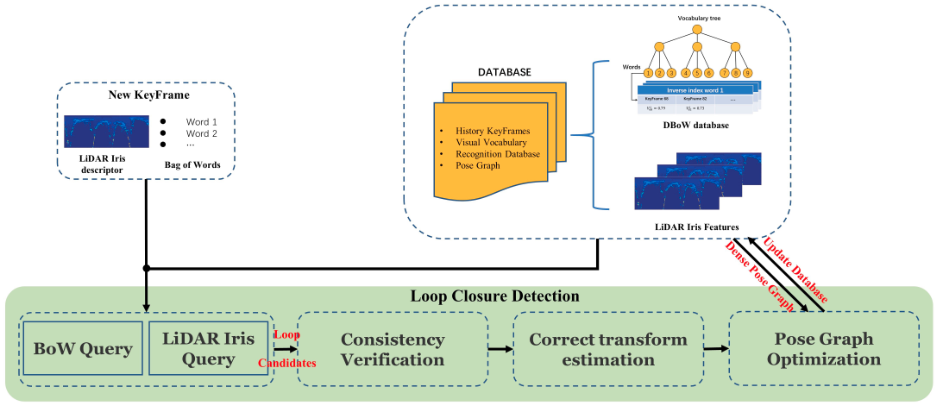
对于每一对输入帧,提取出视觉ORB特征和激光Iris特征,然后根据这两个方法并行的提取匹配对, 一旦成功提取一个候选者,就执行几何一致性验证,然后通过Teasr获取匹配对的位姿,并且通过V-GICP优化,
-
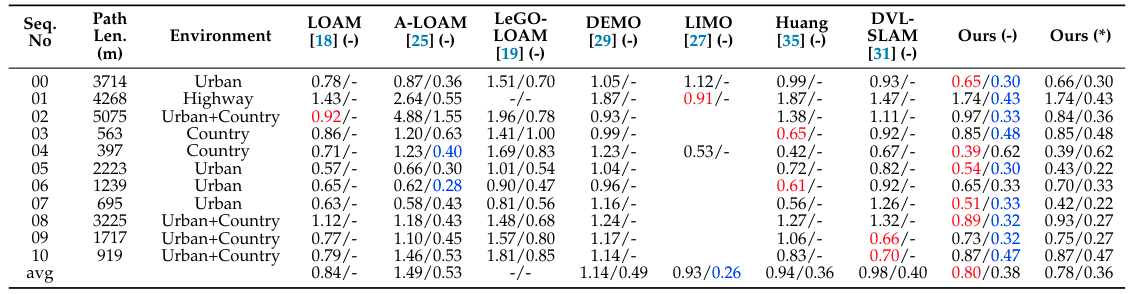
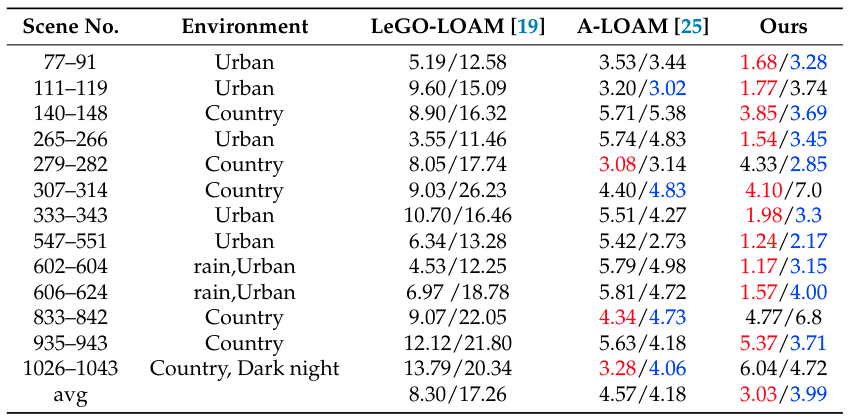
实验结果
KITTI
NUSCENE
不同的关键帧策略
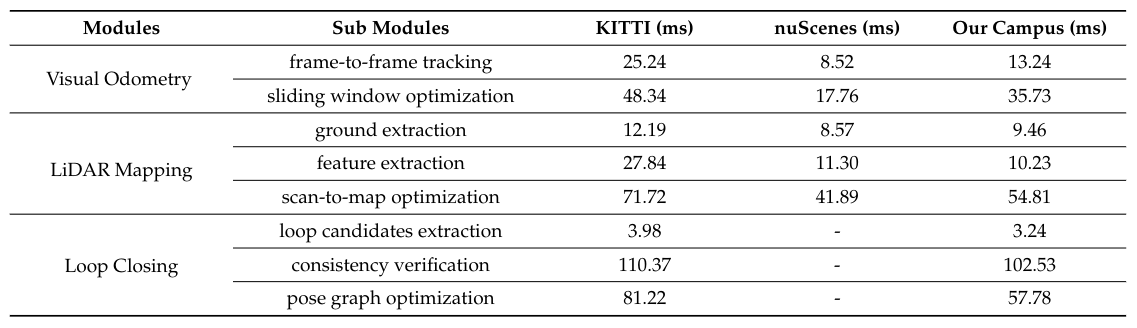
时间
Conclusion
这篇论文基于DVL-SLAM, 前端加了滑窗优化,后段加了融合回环,结果上来看,前端加了滑窗优化提升的效果比较明显,后端的融合回环感觉提升不大。