
本周在赶实验,论文阅读有点粗糙,见谅。
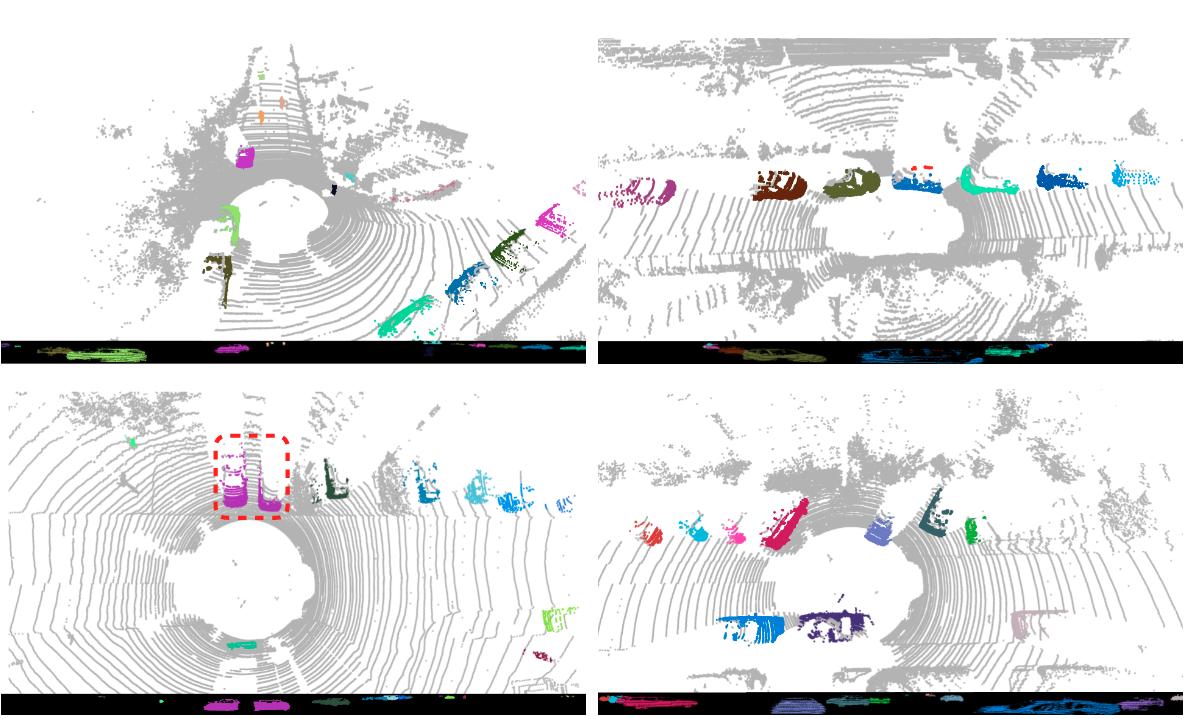
之所以本周选择了这篇文章,一是因为ICCV做激光SLAM工作的确实不多,能中ICCV的SLAM工作,肯定是值得一读的;二是因为这个文章其实类似于一个综述,虽然提出了一个将激光雷达全景分割和聚类结合的算法,但是主体内容还是分析对比现有的聚类算法的性能,激光雷达的聚类算法,其实无论对于建图还是定位,都是有帮助的,正好通过这篇文章来大概过一下比较好的聚类算法;三是实验效果图挺有意思。
《A Technical Survey and Evaluation of Traditional Point Cloud Clustering Methods for LiDAR Panoptic Segmentation》(ICCV2021)
Motivation
激光雷达全景分割是自动驾驶中的一项新任务,虽然目前流行的方法是通过端到端的训练来解决这个任务,但是作者认为基于几何结构的聚类值得使用,因为他展示了和端到端的sota效果类似的性能。另外,作者在调研中发现,目前没有人将激光雷达全景分割和点云聚类算法混合使用,所以作者将目前比较好的实时性能的点云聚类算法打包放到现有的深度学习框架中使用,效果不错。
Contribution
-
为激光雷达全景分割提出了一个新的框架,并且是第一个尝试证明将激光雷达全景分割和点云聚类结合解决问题的可行性的工作, 并且这篇文章中提出的方法优于目前所有的端到端的方案, 并且因为将经典的聚类算法运行在ms级别的CPU上,减轻了实例部分的标签工作,并且有机会更好地适应新的看不见的场景,因为它对训练集没有偏见,并且因为嵌入了传统的聚类算法,他并不是一个黑盒,可以显著的告知用户什么时候表现好,什么时候表现差。
-
为雷达聚类算法建立一个基准。以往关于 LiDAR 聚类方法研究的一个问题是,由于存在较大的非物体表面,如墙壁和地面,评估指标的模糊性。在这份工作中,作者通过使用带有已发布代码和检查点的语义模型过滤掉所有这些非对象点,所以聚类算法只能关注属于对象的点。最后进一步使用公认的全景分割评估指标来直接评估和比较不同聚类方法的有效性
Content
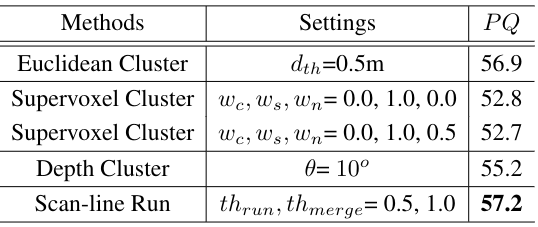
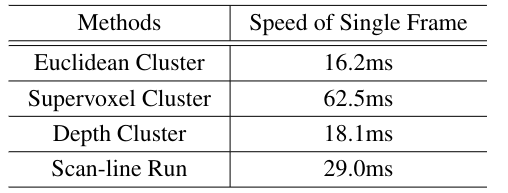
- 关于聚类性能的评价
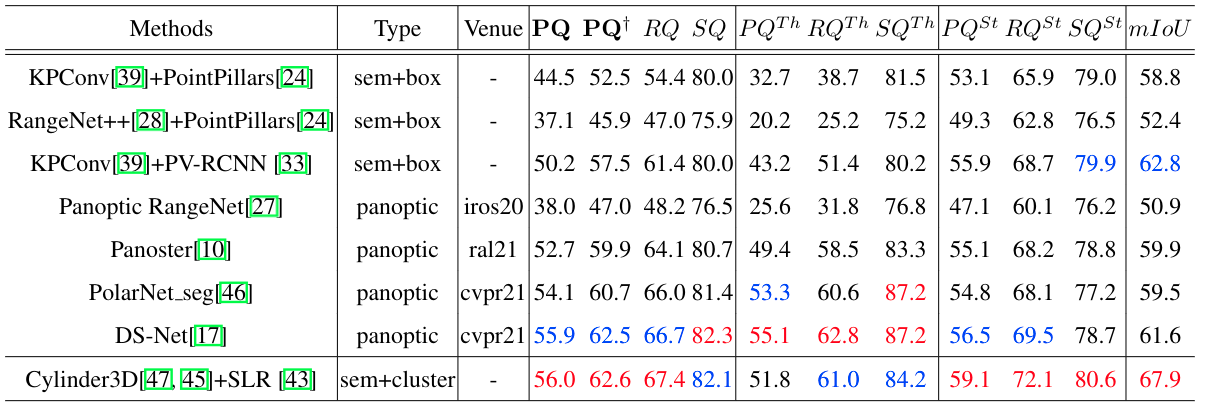
- 将聚类算法应用到全景分割方法的评价
Conclusion
这篇文章写的真的很好,推荐有时间的读者可以仔细阅读,由于时间限制,这篇文章没有仔细的进行总结,总的来讲,这篇文章是一篇review,但是不同于其他review的是,他review之后提出了自己的方法,并且获得了很好的效果。