
《π-LSAM: LiDAR Smoothing and Mapping With Planes》(ICRA2021)
Motivation
针对目前广泛使用的loam框架,作者认为有两个问题,一个是不包括BA,另外是位姿精度低(尤其是室内环境)。所以这篇论文的出发点主要是解决loam框架的室内环境缺陷。具体的讲,前端提取面特征作为地标,后段引入面调整来优化位姿。
Contribution
- 我们引入了平面调整(PA),它联合优化关键帧姿势和平面参数以最小化后端中的点到平面距离。
- 提出pi参数来降低PA的复杂度
- 我们提出了一种有效的方法来对准两个平面扫描以检测环路闭合
- 引入了一个ICP过程,以实现实时全局地图注册。与只考虑两点云之间数据关联的传统ICP不同,我们的ICP过程保持逐扫描的数据关联,这允许我们在激光雷达扫描中直接识别平面,而无需在每次扫描中明确执行耗时的平面检测。
- 地图表示为平面参数,易于存储和更新。相反,基于ICP的方法(如loam)中的地图为通常组织为KD树, 存储耗时耗空间。
Content
-
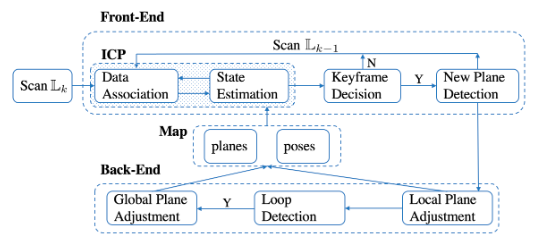
系统框图
前端建立局部到全局的点到平面的约束, 通过ICP流程实施,并提供实时全局一致姿态。后段联合优化面和关键帧的位姿。
-
平面特征提取
使用$\pi$来表示平面:
因为$pi$有三个自由度,所以采用最近点向量来参数化:
\[CP(\pi)=dn\]点搜索前首先将点云组织成range image,然后最近点搜索的范围限制在相邻的两行之间。并且在实际过程中只保存大于50个点的平面。
-
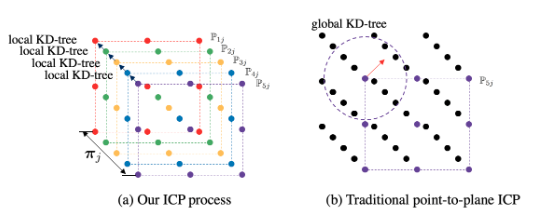
基于ICP的全局注册
如下图,首先要进行数据关联,这一步的目的是把两帧观测到的平面点集进行关联,如果关联成功则确定两个平面的关系,如果关联失败则添加新的平面。
计算位姿采用的是点到面约束:
跟传统的点到面的约束相比较,主要提升了时间的性能。
-
关键帧选择策略
一是备选平面点云集超过三成的点无法匹配
二是当前帧和上一个关键帧之间的距离超过了一个阈值
三是当前帧和上一个关键帧的旋转角度超过了一个阈值
-
PA(平面调整)
类似于VO的BA(同时优化三维点和相机位姿),这里采用同时优化平面参数和位姿的方法来约束后段,下图是优化的因子图:
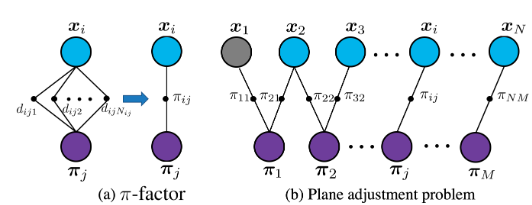
首先可以将上面的点面误差通过累加的方式得到一个新的PA误差:
显而易见的是这个复杂度十分高,因为直接受制于平面点集的点的个数,所以通过引入$\pi$参数的方法来简化。
\[d^2_{ijk}=\pi^T_{j}T_ipp^TT^T\pi\\ =\pi^TTGT^T\pi\\ \pi_{ij}(T_i,\pi_j)=\sqrt{c_{i,j}(T_i,\pi_j)}\]$pi$参数的形式很方便加入到因子图,对于每个点集只需要计算一次G,这个显著的减少了优化所需要的时间。
最后PA的代价函数形式可以重写如下:
\[E=\frac{1}{2}\sum\sum\pi^2_{ij}(T,\pi)\]-
LPA(局部平面调整)
这个是为了进一步提高计算效率,引入了滑窗的思想,在一段滑窗内构建因子图进行优化。
除了按照时序更新滑窗以外,还按照下面三个准则来剔除关键帧:
一是这个关键帧不包括一个新的平面,或者它的新的平面全部被剔除
二是两个关键帧之间的距离小于0.3m,则剔除后面的关键帧。
三是两个关键帧之间的旋转角度小于15度,则剔除后面的关键帧。
-
GPA(全局平面调整)
这个部分的目的是执行另一个优化全部平面的线程来辅助优化,执行频率文章中虽然没说,不过应该很低。
-
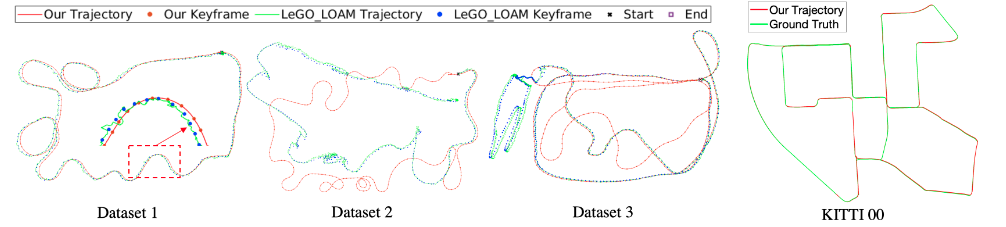
实验结果

Conclusion
这篇论文,感觉是基于loam的点面残差,再结合另一个作者提出的平面表示方式,从而提出了一个新的形式化的平面残差,后段的贡献比较大,通过建立一个面因子图,实现了类似于视觉BA的PA。