
上一篇写了ORB1的论文阅读分析,今天就继续写ORB2,众所周知,ORB2是ORB1的改进版,最大的特点就是单目变成了双目
《ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras》(TOR2017)
Motivation
单目的ORB存在尺度的问题,所以作者想到将ORB提升到双目的层次,来解决单目尺度估计的问题。
Contribution
- 第一个用于单目、双目和RGB-D相机的开源SLAM系统,包括闭环、重定位和地图重用。
- ORB的RGB-D结果表明,通过使用BA,比基于ICP或光度和深度误差最小化的方法获得了更高的精度。
- 通过使用近、远双目点和单目观测,结果比最先进的直接双目SLAM更精确。
- 提出了一个轻量的定位模式,可以在地图被禁用的时候,使用地图。
Content
-
系统框架
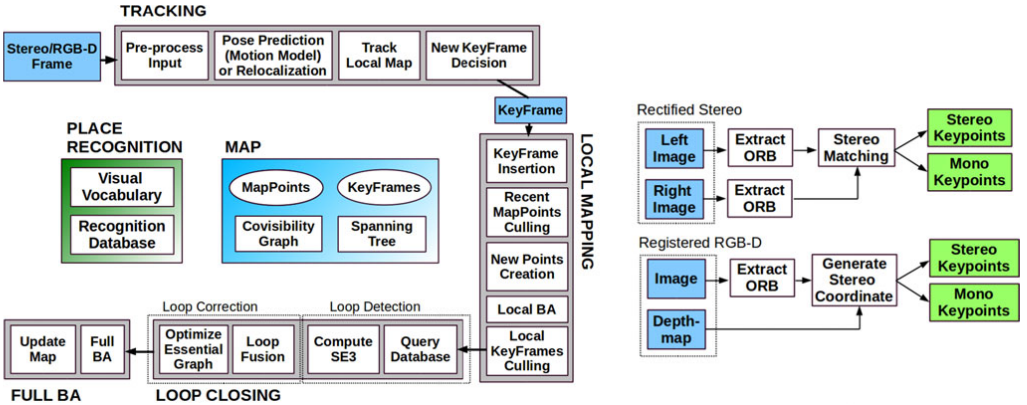
如下图,主要分成三个部分,跟踪,建图,回环,跟踪部分会对传感器进行统一,使得无论输入的是RGB-D还是双目图像,最后都转成双目点集和单目点集进行处理。因为ORB2和ORB1的主要部分是在于加入了双目,所以接下来重点分析ORB2如何利用双目深度信息的过程。
-
单目关键点,近双目关键点,远双目关键点
ORB2中同时存在单目和双目关键点,并且又细分为近点和远点。
双目关键点的坐标表示: $X_s = (u_L,v_L,u_R)$, $u_L,v_L$是左图像的坐标,$u_R$是右图像的水平坐标,对于RGB-D图像,可以将深度值转换成虚右图像坐标: \(u_R=u_L-\frac{f_xb}{d}\)
-
有单目和双目约束的BA
A. 仅运动的BA优化
\[{R,t}=argmin_{R,t}\sum_{i\in X}\rho(\|x^i_{(.)}-\pi_{(.)}(RX^i+t)\|^2_\sum)\]$\pi$是重投影公式,单目和双目的重投影公式如下:
B. 包含局部地图的BA
\[\{X^i,R_l,t_l|i\in P_L,l\in K_L\}=argmin_{X^i,R_l,t_l}\sum_{k\in K_L,k\in K_F}\sum_{j\in X_k}\rho(E(k,j))\\ E(k,j)=\|x^j_{(.)}-\pi_{(.)}(R_kX^j+t_k)\|^2_{\sum}\]-
回环和关键帧插入策略
这两个部分和ORB1基本一致,不再重复。
-
实验
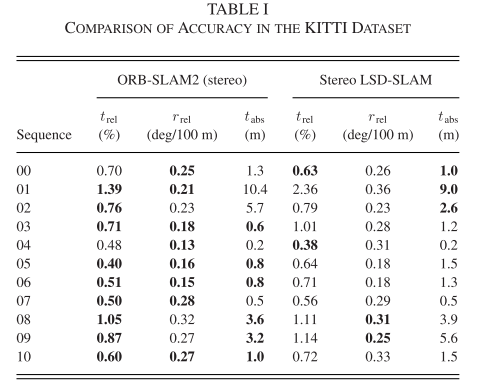
1). KITTI
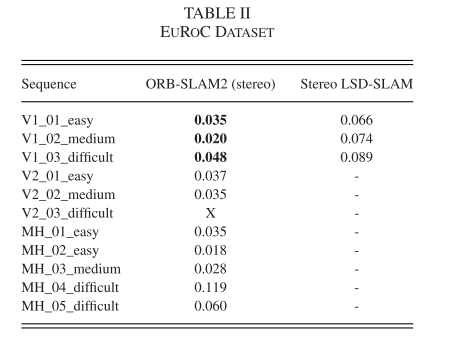
2). EUROC
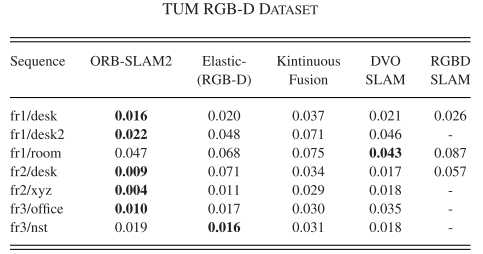
3). TUM
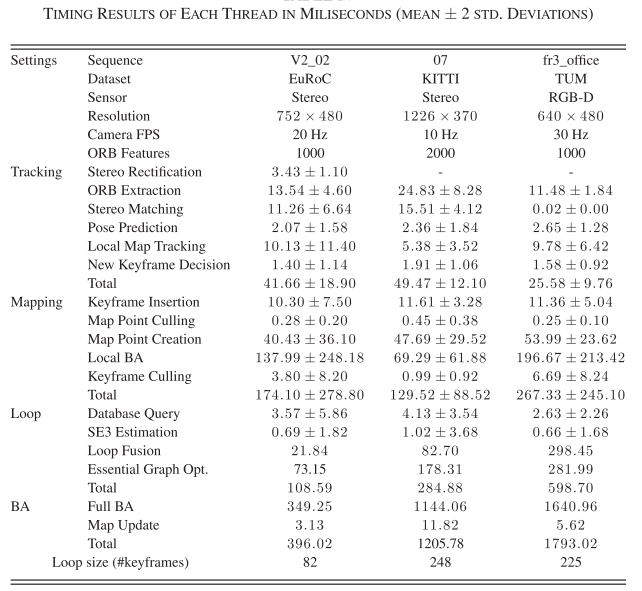
4). 时间分析
Conlusion
实事求是的讲,ORB1和ORB2从算法层面上看,差别不大,主要就是添加了对于双目/RGBD的支持,但是程序上看有几点比较大的变动:
1).摆脱了对ROS的依赖,显示模块采用了pangolin,使得编译更加轻便。
2).对于双目和RGBD的支持十分简单,提供了接口。
3).把回环的词典文件换成了二进制文件,根据issue的作者回复,这可以极大提升读取速度。
4).将特征点存储在四叉树结构中,加速匹配以及均匀化分布。