
《MSTSL: Multi-Sensor Based Two-Step Localization in Geometrically Symmetric Environments》(ICRA 2021)
Motivation
对称环境对于定位的挑战比较大,因为其地理测量结构高度相似,并且特征不充分。在这篇文章里,考虑融合利用测得的磁场、二维激光雷达和轮式里程计信息来解决这个问题。主要起到一个初始化作用的是磁场,通过预建立的磁场的匹配,可以获得一个初始的定位范围,从而一定程度上缓解了这个问题。
Contribution
- 提出了一个新的无需地面辅助设备的在对称环境中定位的方法.
- 对称环境下基于多传感器定位问题的数学建模及其概率推导.
- 丰富的实验证明.
Content
-
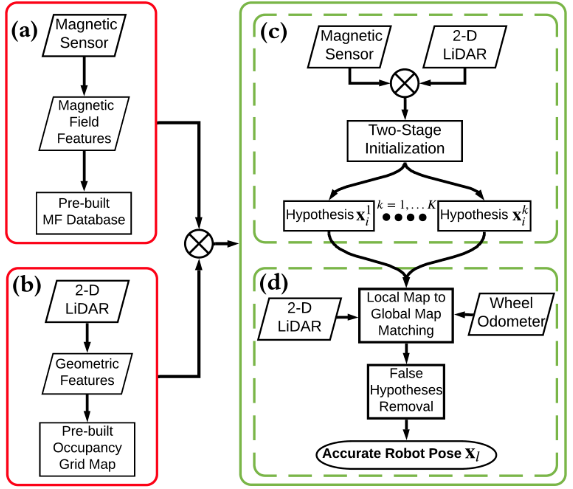
系统框图
整个系统可以分成一个离线进程和一个在线进程,离线进程主要做两个事,一是收集磁场数据并且建立磁场地图,二是提取几何特征并且建立体素格地图;在线进程也是包括两步,一是基于磁场的初始化,二是基于雷达的定位。
-
问题描述
输入:
\(z=[z_i,z_l]^T=[z^B_i,z^L_i,z^L_l]^T(B指的是磁场信息,L是雷达信息,i是当前帧,l是上一帧)\\ u_i,人工控制的输入\\ M=[m^B,m^L]^T地图\)因此,在对称空间的定位问题可以描述为一个概率分布模型:
将上面公式的初始化部分通过贝叶斯改写:
\[p(x^k_i|z^k_i,m^B)=\eta_ip(x^k_i)p(z^k_l|x^k_i,m^B),\eta是正则化常数项\]对于公式的定位部分,用马尔科夫性质改写:
\[p(x^k_l|x^k_i,z^k_l,u^k_l,m^L)=\eta_lp(x^k_l|x^k_i,u^k_l)p(z^k_l|x^k_l,m^L)\]-
基于磁场的初始化
建立磁场数据库的过程不作描述,感兴趣的可以看论文原文。下面主要讲如何在已经建好磁场地图的情况下进行初始化。
主要是分成两步:一是定位确定,二是方向确定。
首先是定位确定,为了确定初始的一个位置,首先描述三个坐标系如下图,全局坐标系,查询帧坐标系和数据库坐标系。鉴于附近位置的 MF 数据可能具有相似的值并考虑到不确定性,根据概率选择前 K 个假设位置,并且采用多元高斯概率分布作为模型。
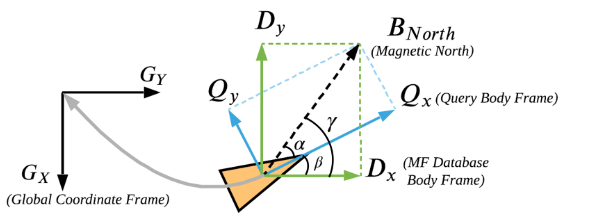
对于方向确定而言,最有可能的旋转是满足:
\[G=^G_DR^i\cdot D^i\\ \phi=arccos((D^i\cdot G)/(\|D^i\|\|G\|))\]考虑到磁力计的运动是直线配置的,最后的划分为:
\[\theta=\left\{\begin{matrix} 0, if\ \phi_i=0 \\ -\pi, if\ \phi_i=\pi \\ -\frac{\pi}{2}, if\ \phi_i=\frac{\pi}{2}\ upwards\\ \frac{\pi}{2}, if\ \phi_i=\frac{\pi}{2}\ downwards \end{matrix}\right.\]-
基于雷达的定位
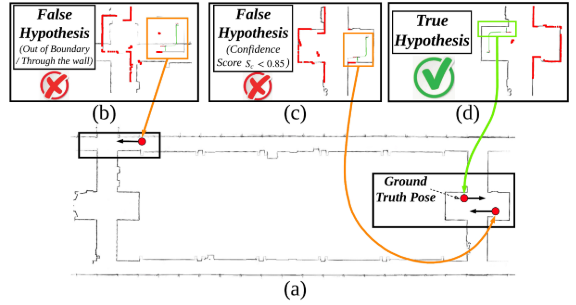
基于二维雷达的运动模型可以定义为($\delta$是轮速器的测量值): \(\left\{\begin{matrix} x^k_l=x^k_i+\delta d^k_l cos\theta^k_i\\ y^k_l=y^k_i+\delta d^k_l sin\theta^k_i \\ \theta^k_l=\theta^k_i+\delta \theta^k_l \end{matrix}\right.\)
最后的两个综合起来,可以有效的约束置信边界的范围如下图:
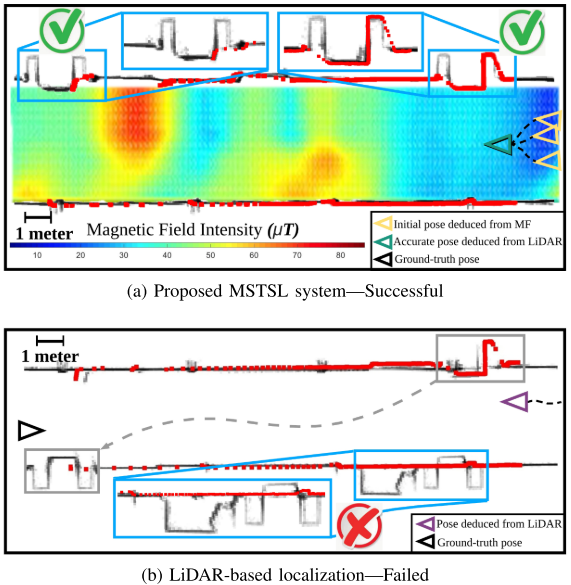
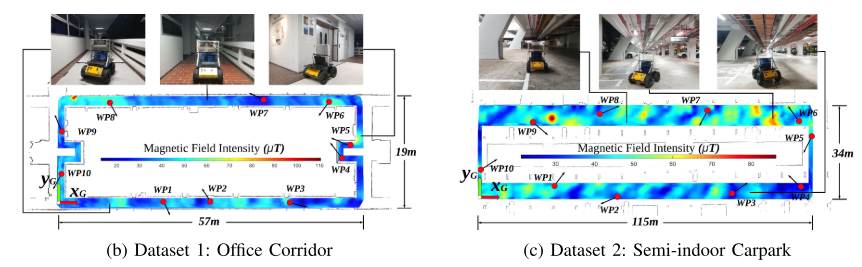
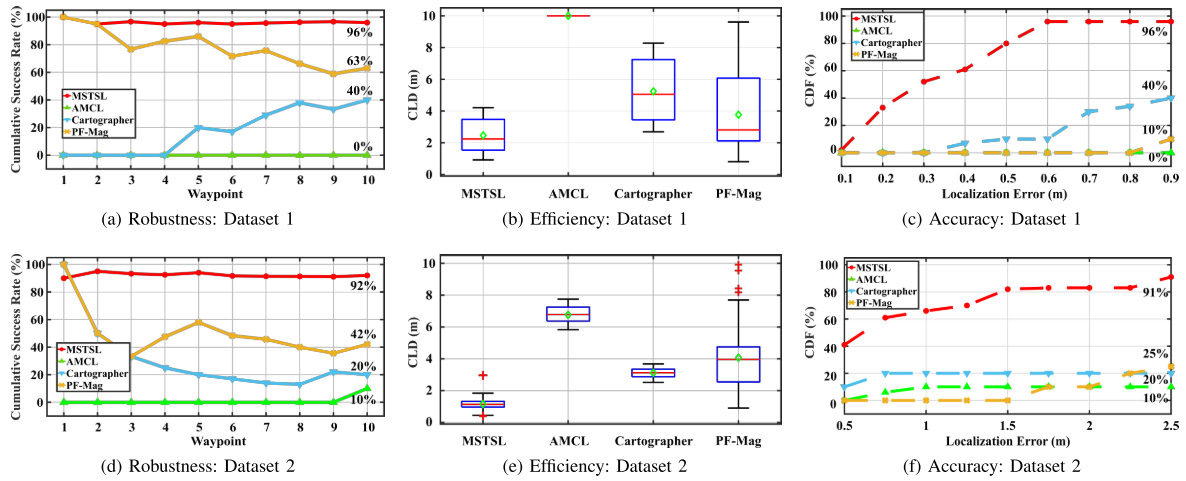
- 实验结果
Conclusion
这篇论文主要是通过加入磁场传感器来解决室内的定位问题,看的比较快,后续如果用到磁力计的话,是需要重新仔细看的。