
这篇文章是github上面逛到的一个论文,效果很不错,在02的环境下rmse小于5,代码地址: https://github.com/jypjypjypjyp/lvio_fusion
《Lvio-Fusion: A Self-adaptive Multi-sensor Fusion SLAM Framework Using Actor-critic Method》(Arxiv.6.21, 2021)
Motivation
这篇文章整体结构是基于图优化的多传感器融合框架,但是基于这个基础上,首先基于城市环境的累积漂移问题,他做了GPS+回环的分段检测,其次针对多传感器融和的权重问题,它采用了强化学习的actor-critic算法来动态给定传感器的权重。
Contribution
- 基于优化的双目相机、lidar、IMU和GPS紧密耦合的多传感器融合框架,实现了高精度、实时的移动机器人轨迹估计
- 针对城市交通场景,提出了一种分段全局优化方法,该方法可以消除累积漂移,提供全局位置
- 提出了一种基于actor-critic方法的自适应算法,该算法能够根据不同的环境自适应地调整传感器的权值。
Content
-
系统框图
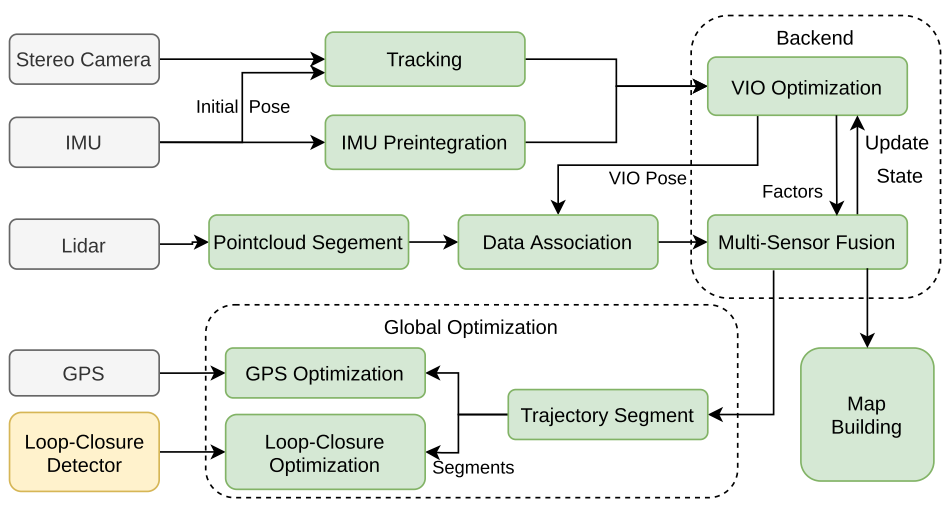
如下图,视觉前端从双目摄像机中获取三维地标,进行帧间跟踪和三角化。同时,高频IMU测量将为帧间跟踪提供初始姿态,之后再计算视觉帧间IMU预积分。然后进行了VIO局部优化。对于lidar,提取一个以视觉关键帧为中心的点云扫描,然后分割地面点云。以视觉惯性里程计中获得的姿态作为初始姿态,采用loam的特征关联方法,第二次进行局部优化,包括lidar、visual和IMU。此外,还引入GPS约束和回环约束来优化全局姿态图。
-
IMU预积分因子
基本和VINS一样:
\[\hat{\omega_t}=\omega_t+b^w_t+n^w_t\\ \hat{a_t}=R^{BW}_t(a_t-g)+b^a_t+n^a_t\\ r_{B_i}=\begin{bmatrix} r_{v_i}\\ r_{p_i} \\ r_{R_i}\\ r_{b_a{i}}\\ r_{b_gi} \end{bmatrix}\\ =\begin{bmatrix} R^T_{i-1}(v_i-v_{i-1}-g\Delta t_i)-\Delta \hat{v}_i\\ R^T_{i-1}(p_i-p_{i-1}-v{i-1}\Delta t_i-\frac{1}{2}g\Delta t^2_i)-\Delta\hat{p}_i\\ R^T_{i-1}R_i\hat{R}^i_{i-1}\\ b_{a_i}-b_{a_{i-1}}\\ b_{g_i}-b_{g_{i-1}} \end{bmatrix}\] -
雷达因子
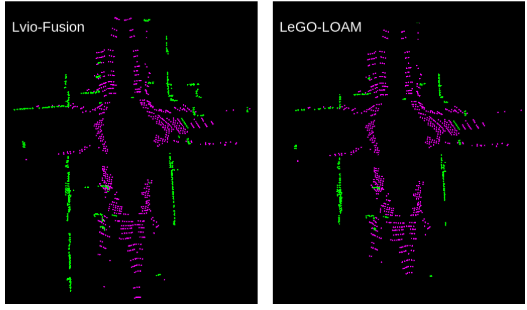
这个基本和loam一样,唯一的区别在于曲率的计算方式,原本的loam计算曲率的时候,忽视了激光射线和平面的夹角,所以将曲率的计算改为:
\[\Delta r=(r_{i-n}-r_{i+n})/2n\\ c=\frac{a}{(2n-1)r_i}\sum^{2n-1}_{k=1}(r_{i-n+k}-r_{i-n}-k\Delta r)^2\]经过这个改进的曲率公式处理后,可以识别到相对更远的平面,如下图.
-
位姿图优化和回环检测
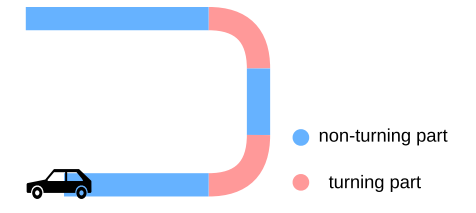
基于实际实验中的发现,在转弯时产生的旋转误差比不转弯的旋转误差大很多,所以将整个路径根据行驶角度进行分段,然后分段进行优化和检测。
分段位姿图优化分为两个阶段。首先,利用GPS约束和闭环约束对零件进行优化;其次,对同一部位的关键帧进行优化,根据是否处于转弯部位,重点对转弯部位的关键帧进行旋转误差优化,对非转弯部位的关键帧进行正向误差优化
-
基于actor-critic的权重自适应算法
强化学习框架中的环境是多传感器融合算法,其作用是各种因素的权重,观察是机器人从传感器感知到的当前状态信息,奖励定义为估计姿态与实际姿态之间的相对姿态误差(相对位姿误差)的倒数:
\[reward_{i}=\| (Q^{-1}_iQ_{i+\Delta})^{-1}(P^{-1}_iP_{i+\Delta})\|^{-1}\] -
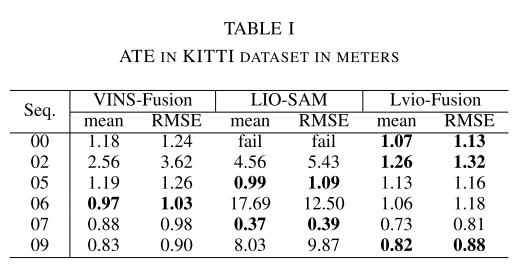
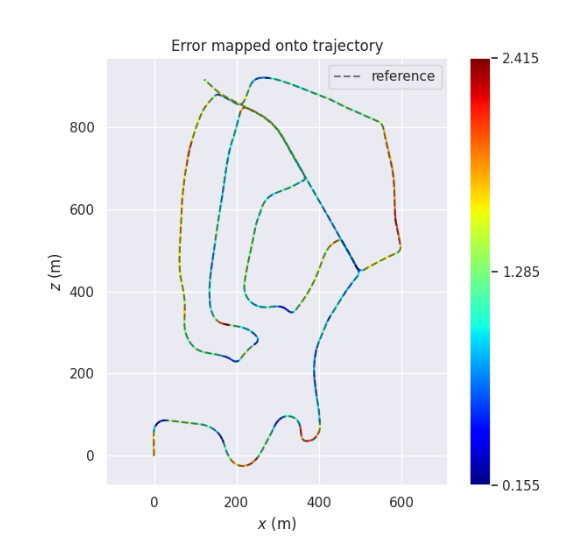
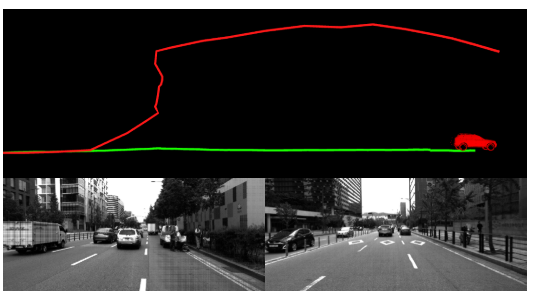
实验
Conclusion
这篇文章是个初稿,实验部分不够完善,不过从已经放出来的实验效果来看还是不错的,提升我认为主要是基于强化学习的动态权重机制所带来的,另外分段优化也是个不错的思路。