
《VIRAL-Fusion: A Visual-Inertial-Ranging-Lidar Sensor Fusion Approach》
Motivation
多传感器融合,提出了一个新的融合框架
Contribution
- 覆盖了目前大部分的传感器:UWB,IMU,VIO and LOAM
- 将IMU预积分和UWB进行了结合
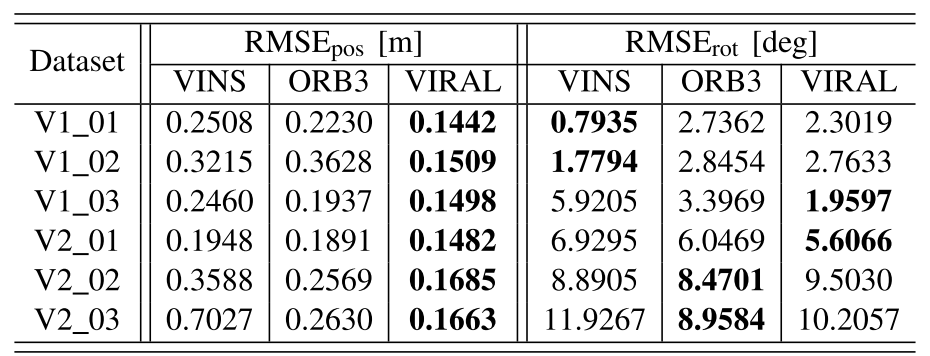
- 在公开数据集上的实验效果达到了领先
Content
-
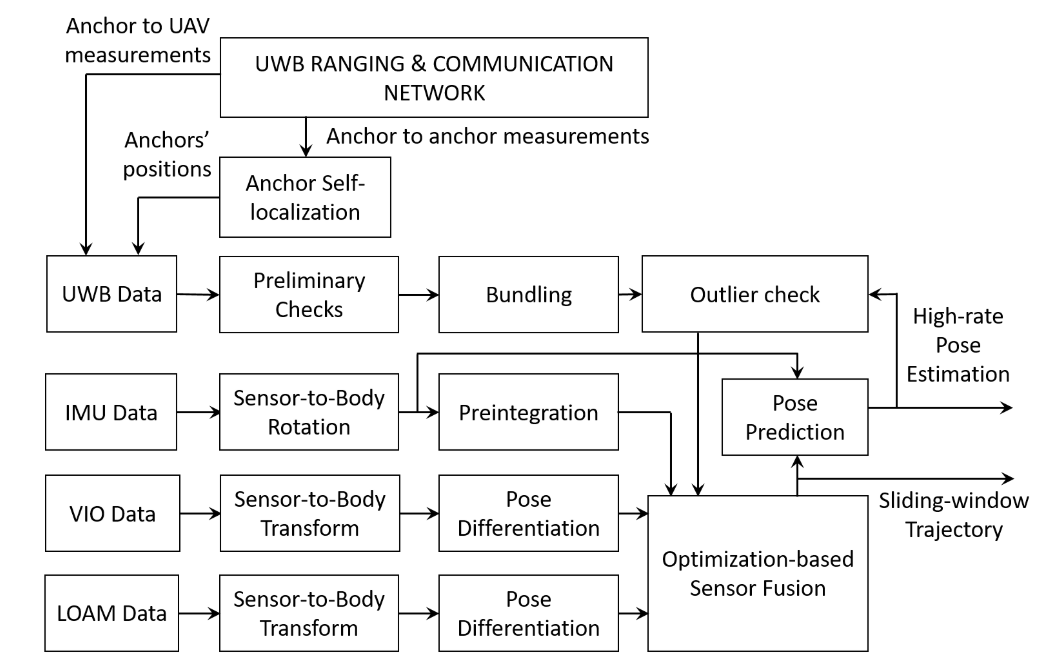
系统框图
系统框图,分别输入UWB,IMU,VIO,LOAM的数据,然后通过优化的方式进行数据融合
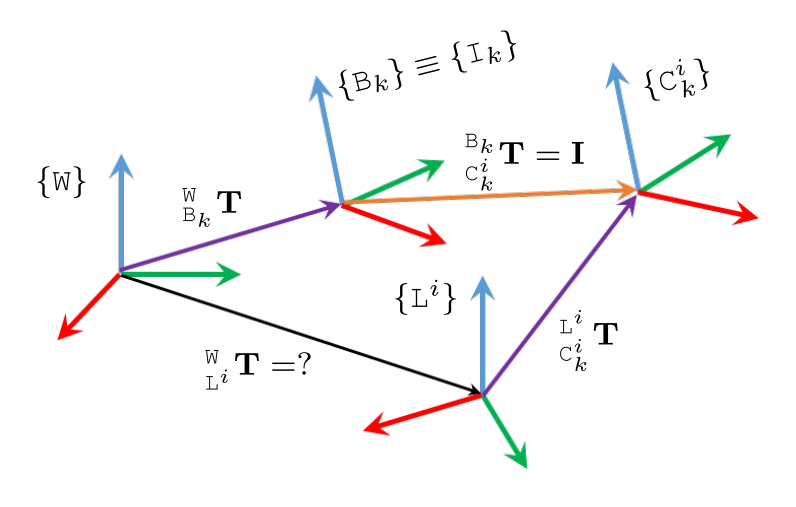
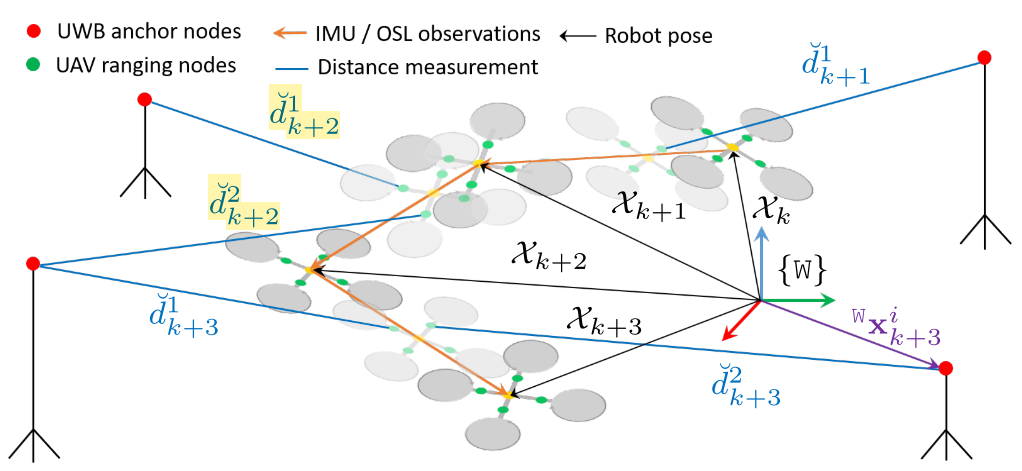
- 坐标系统和基于IMU和UWB的滑窗示意图
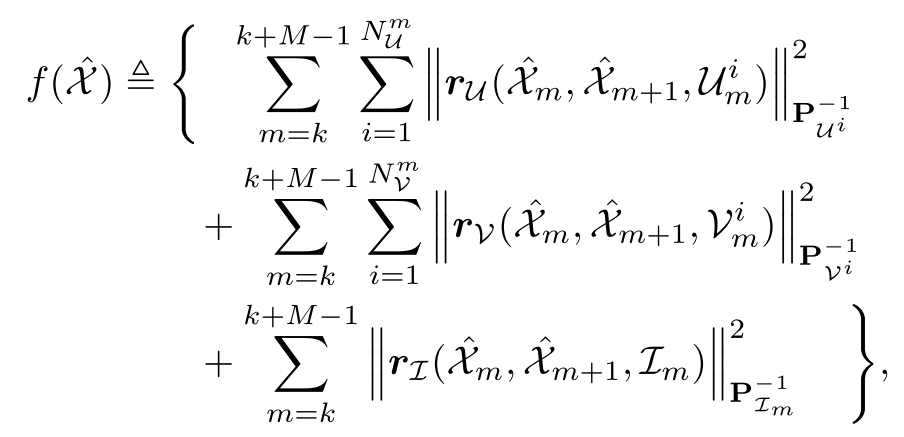
- 优化
滑窗内的位姿的定义:
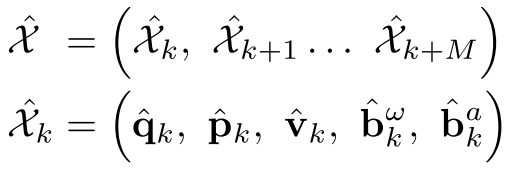
代价函数:
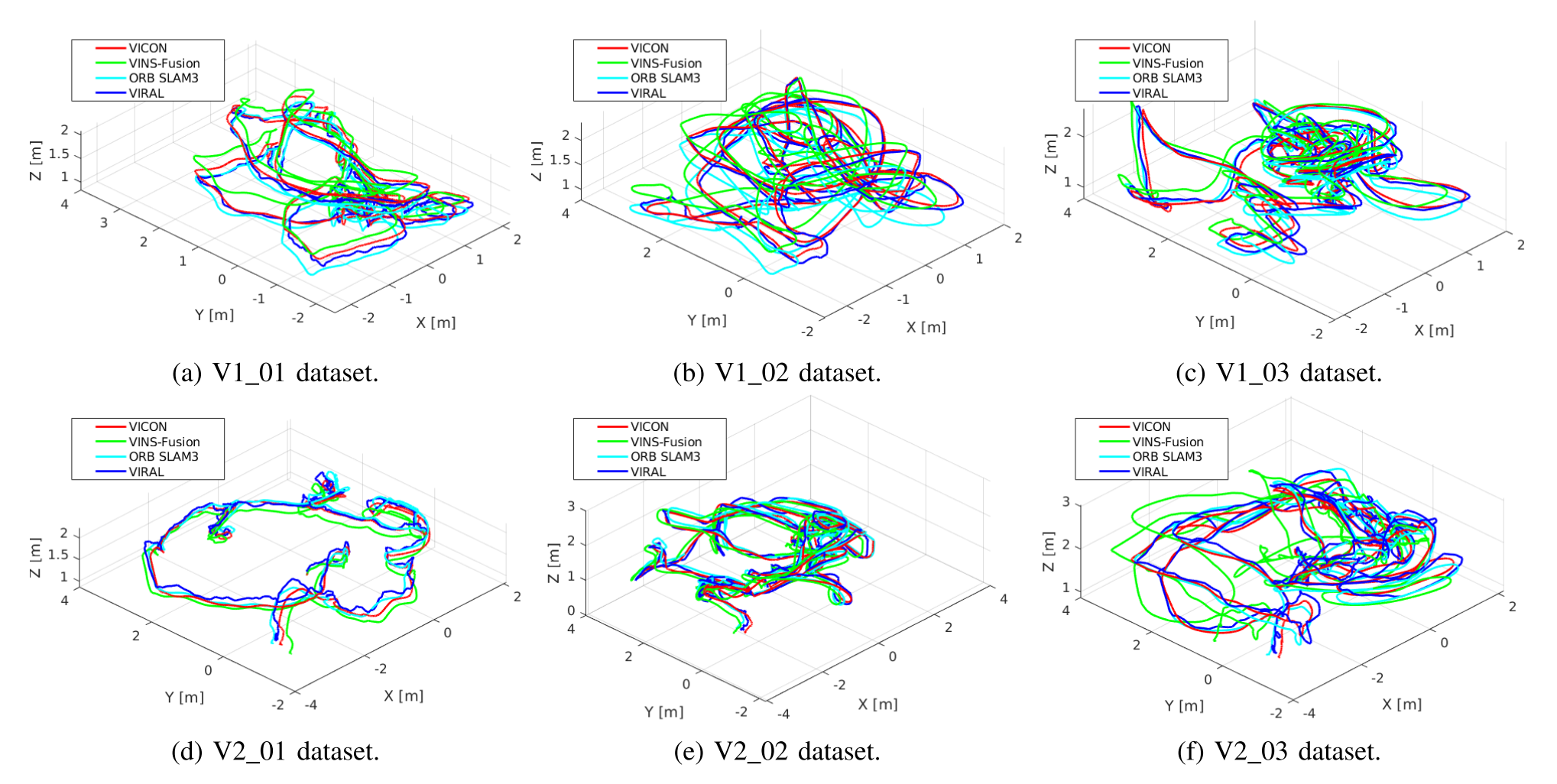
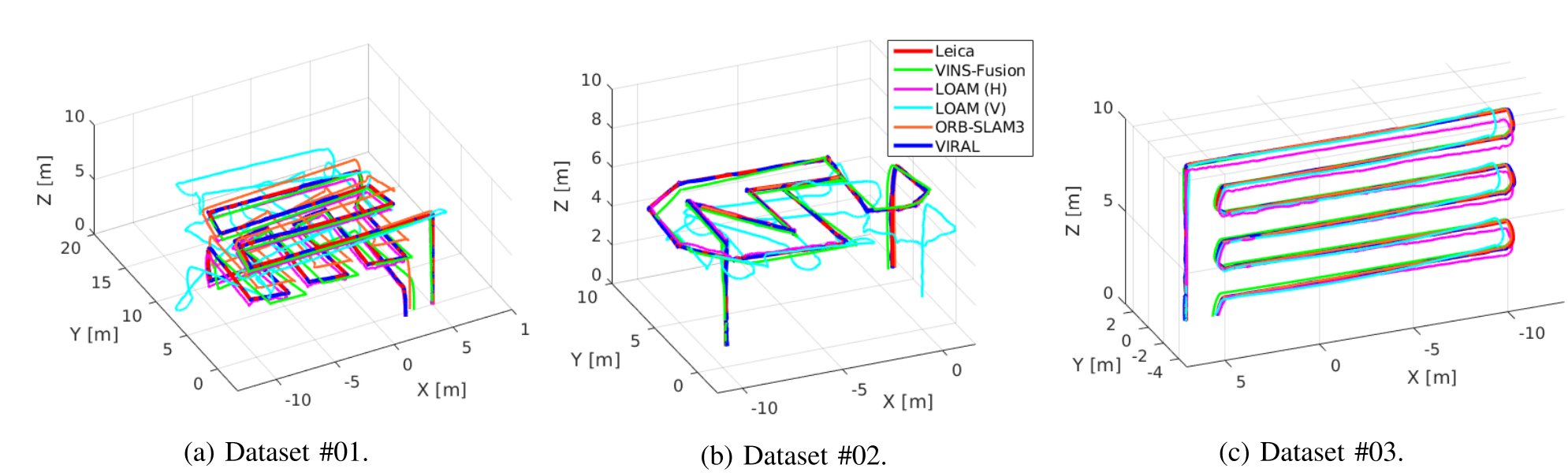
- 实验

Conclusion
这篇论文主要是提出了一个基于优化的多模态传感器融合的框架,这种类似的思路,之前也看过很多篇,不过这篇给我印象最深的一点还是他的实验,基本达到了全线领先,文章中详细推导了他的代价函数,不过还没有时间重新推导,后续有时间要推导一下。