
《Visual-LiDAR Odometry Aided by Reduced IMU》(ISPRS2016)
Motivation
多传感器融合提升里程计精度
Contribution
- 一个松耦合的传感器融合框架
- 视觉提供雷达配准的初始位姿,用EKF结合IMU数据输出最终位姿
- 视觉辅助激光里程计,只使用激光估计的位姿与IMU做融合
Content
- 框架图
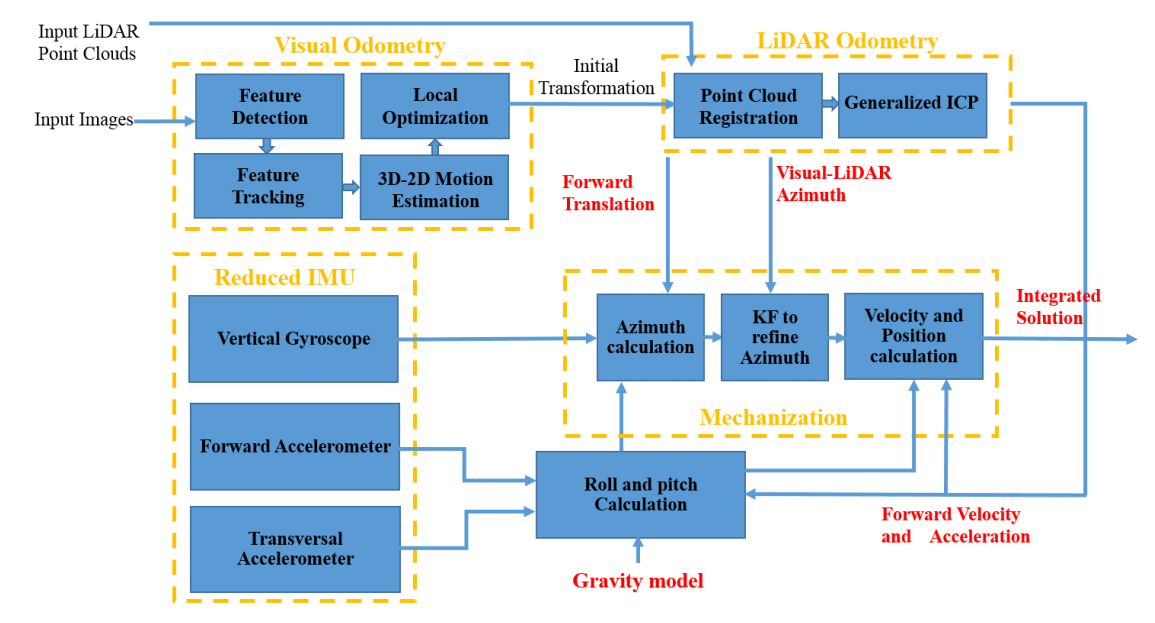
a. 启动视觉里程计(常规的特征点提取匹配步骤,没有用到雷达深度)
b. 视觉里程计作为高频初始位姿输出给雷达里程计作为ICP的初值
c. 雷达里程计接收到初值后进行点云注册和启动ICP
d. IMU持续接收信息用来和雷达位姿进行KF融合:
I: 误差状态模型:

II: 评价模型

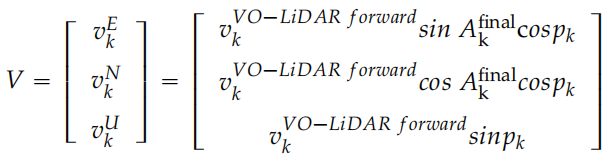
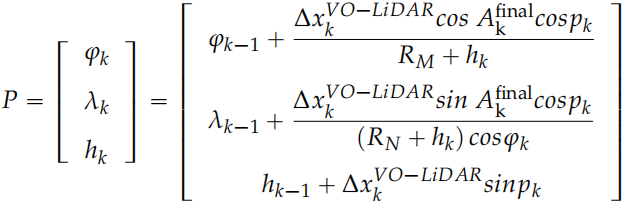
III: 最后更新后的速度和位姿:
-
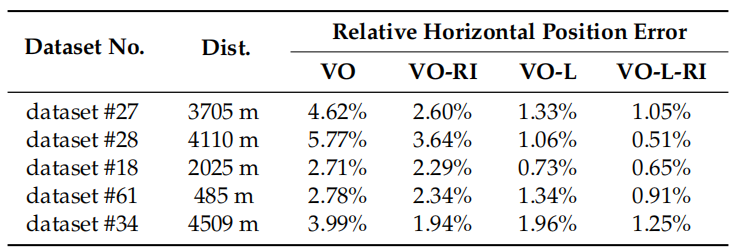
实验结果
Conclusion
这篇论文当时找的时候是通过vloam的引用找的,但是可以看出他的论文效果比较一般,就最后的结果而言,我觉得甚至都比不上aloam,我觉得这篇论文的唯一的贡献就在于提出了雷达位姿和IMU的KF公式