
这篇文章的作者是LIO-SAM的作者,LIO-SAM是一个紧耦合的激光惯性系统,在这篇文章中,作者把它自己的LIO-SAM和VINS-MONO结合,取得了不错的里程计效果。
《LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping》(ICRA 2021 )
Motivation
回顾LIO-SAM,其实在做LIO-SAM的论文实验的时候,作者用的设备就是一个带有摄像头的lidar+IMU设备,所以估计作者在写完LIO-SAM就准备直接加入视觉信息了,融合原因大体逃不出一个精确性和鲁棒性。
Contribution
- 基于因子图融合提出了一个紧耦合的LVIO框架
- 提出的框架可以通过故障检测绕过失败的子系统
- 丰富的实验。
Content
-
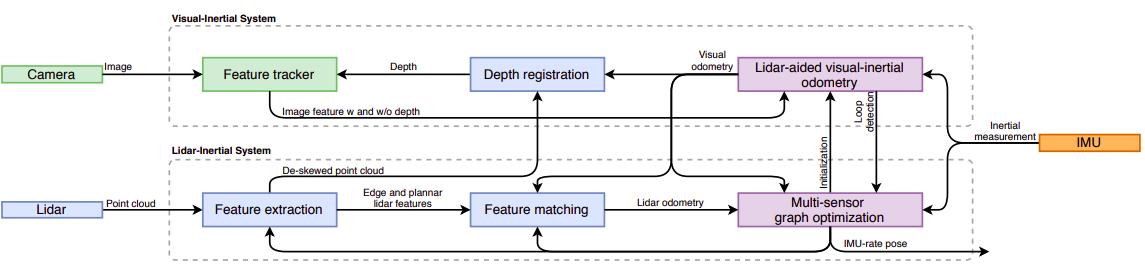
系统框图
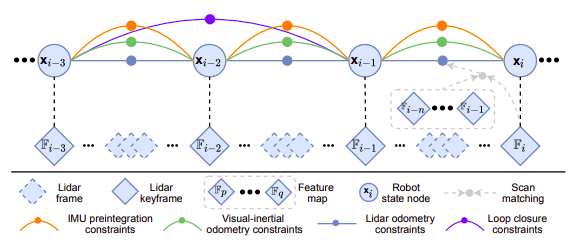
如下图,由两个子系统组成,一个是VIO系统,一个是LIO系统,VIO系统通过单独处理相机+IMU数据给出一个里程计结果, LIS系统通过提取匹配雷达特征给出一个雷达里程计结果,最后,通过联合优化IMU预积分约束,视觉里程计约束,激光雷达里程计约束和回路闭合约束在变量图中的状态估计,可以解决状态估计问题.
-
视觉惯性系统(VIS)
这部分完全照搬的VINS-MONO,所以详细的细节部分直接看VINS-MONO的原论文就可以,这里主要说一下他如何在这里加入了激光的信息:
a.初始化
基于优化的VIO通常会因在初始化时解决非线性问题产生比较大的误差,另外初始化的结果比较依赖于初始的运动和IMU的精确度,VINS-MONO在慢速或者匀速运动时的初始化结果会比较差,原因是因为在这个速度下的IMU获得的加速度不足以为尺度提供比较好的约束。
因此为了提升VIS的初始化效果,作者采用LIS辅助初始化的方式(因为可以从LIS中直接获得深度).然后把这些从LIS获得的状态和IMU偏差进行插值并且和图像帧进行关联,关联后的状态和IMU偏差作为VIS初始化的结果。
b.特征深度关联
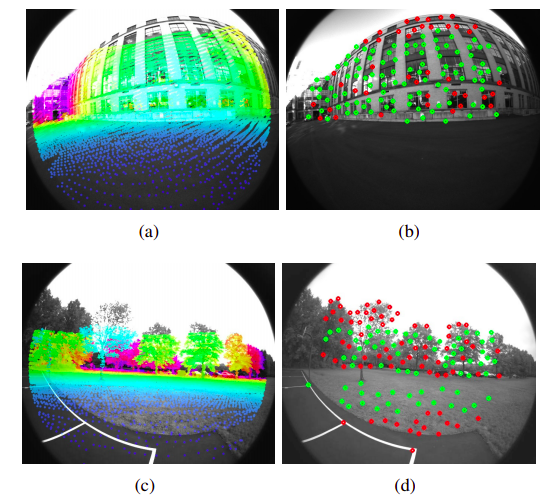
为了获取一个更精确的特征点深度,采用vloam的做法,将雷达点和视觉特征投影到图像坐标上的一个球上,然后降采样找到距离视觉特征点最近的三个深度点,然后得到对应特征点的深度,如下图:
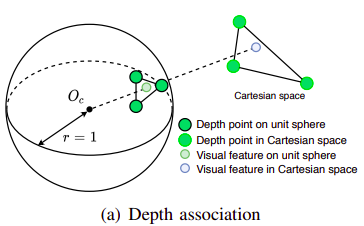
然后对于不同时间戳获得的深度,需要进行进一步的验证,文章中图画的很厉害,但是实际上的做法就是检测匹配到的深度的插值不能大于2m.
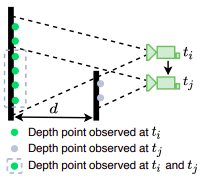
最后的一个特征点获取深度的匹配结果如下图(右边一列绿色的点代表成功匹配到深度的视觉特征点):
-
VIS的失效性检测
这个部分就又得称赞作者的文字表达艺术了,只是加入了一个特征点少于一点阈值和IMU偏差大于一定阈值的判定,就可以说是加入了一个失效性检测模块….
-
激光惯性系统(LIS)
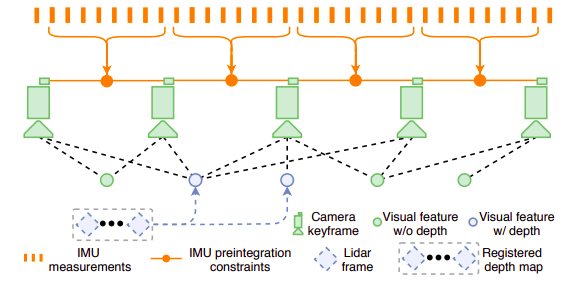
如下图,这个部分是基于作者自己的LIO-SAM进行改编的,维护了具有四种因子的因子图约束,分别是IMU预积分约束,视觉里程计约束,激光里程计约束,回环约束。(具体的因子表示参考LIO-SAM),下面分析这个模块和VIS进行互动的部分.
a.初始化
这里的初始化不同于VIS的初始化的意思,这里的初始化指的是在每一帧雷达做扫描匹配前需要给定的初值,在这里采取的方法是,有VIS结果用VIS, 没有就用自己的。
-
激光失效性检测
这个部分相比于上面视觉的部分就实在很多,主要在文章中判定两种情况的失效,如下图:(左边是激光雷达头朝下,右边是一个空旷的无纹理环境)
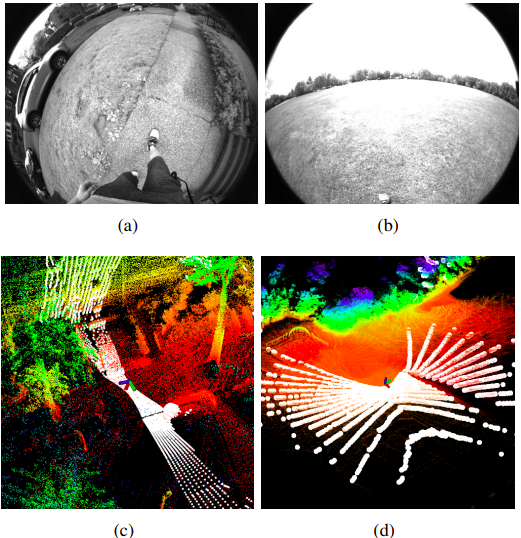
作者解决这个问题的办法是:
针对非线性优化问题:
\[min_T\|AT-b\|^2\]如果发现$A^T A$最小的特征值在第一次优化时小于一个阈值,说明失效
-
实验
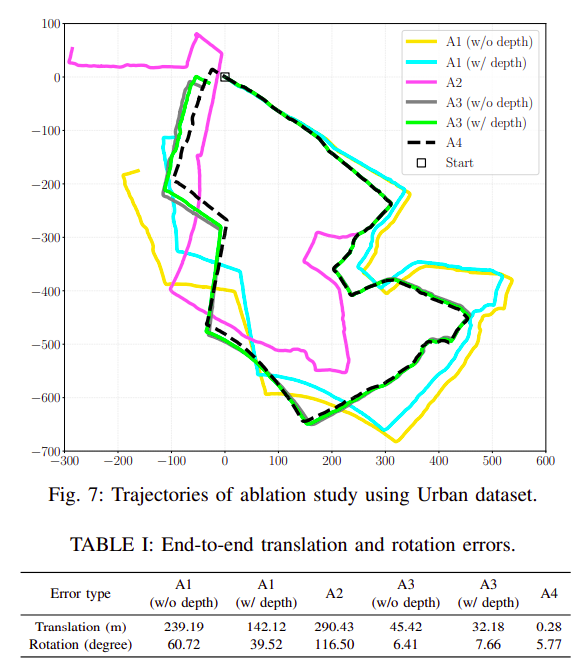
a.消融实验
A1分别研究是是否带有深度图对于VIS的影响,A2代表纯粹的LIS,A3研究的是的是否带有深度图对于整体框架的影响,A4研究的是闭环检测的影响.
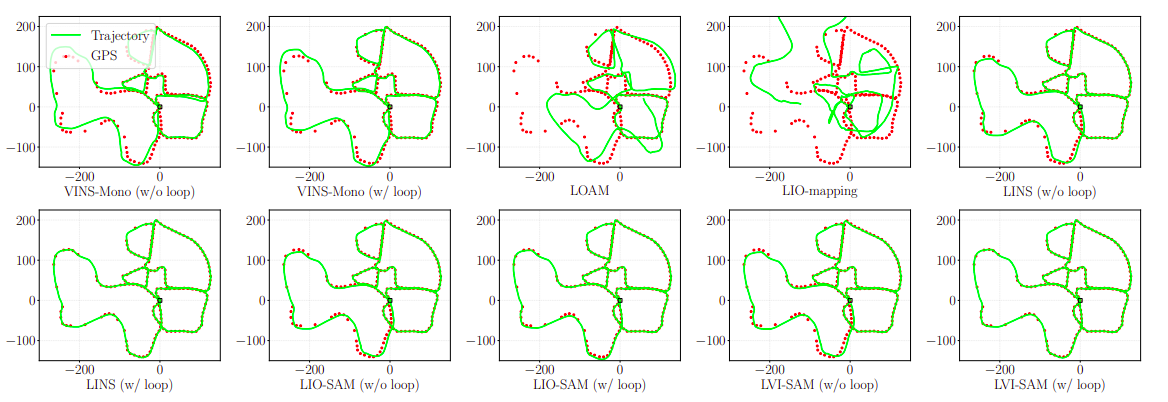
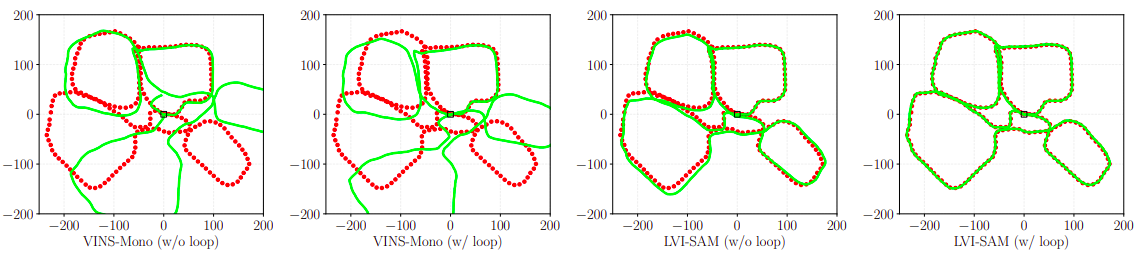
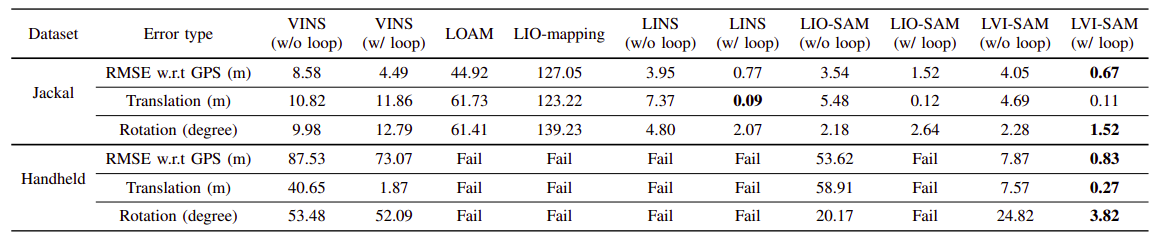
b.手持场景和数据集实验
Conclusion
这篇文章的作者真的很厉害,他的每一份工作都是开源的,这篇文章可以说是他之前提出LIO-SAM后顺手做的工作,工作量不大,但是也中了,说明这个方向目前中论文还是不难的。