
论文阅读《Semantic-Direct Visual Odometry》(RAL 2022 )
2022-06-15
这个文章主要是一个实验分析的工作,文章没有提出新的方法,但是提出了一个假设:激光雷达强度图像可以用于VPR,然后通过目前现有方法的融合证明了这个假设的可行性。在该假设成立的前提下,激光视觉融合或许可以有新的思路.
GPU加速,本质上还是LI-SLAM,里程计基于关键帧进行固定滞后平滑优化,然后在全局建图模块再一次进行因子图的优化。时间上通过GPU加速体素格GICP因子和IMU预积分因子的计算以及融合。
挺有意思的一份工作,跨模态视觉定位。
这两周博客更新的推迟了很多,原因有两个:
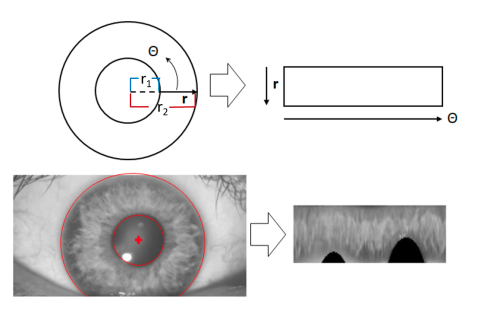
这个IRIS的起名,来源于人的虹膜识别信号。虹膜区域内的每个点通常会通过道格曼橡胶板模型映射为一对极坐标,激光雷达的点云同样也可以被映射为极坐标的表示。
下图是当IRIS检测到回环的时候的候选帧与匹配帧的点云极其对应的IRIS生成图: